waccOS - Part I
Imperial College’s Computer Science undergraduates will be already familiar with the language WACC. It is a While-like language that is part of the mandatory 2nd-year Compilers course and the Integrated Laboratory coursework. Basically, the goal is to create a compiler for the language WACC (for which you are given a specification) in your language of choice in 4 weeks. After the initial 4 weeks, you have 2 extra weeks to implement some extensions of your own choice. Some suggested extensions range from adding fully recursive pair types, dynamic typing, all the way to garbage collection and even static analysis for dynamic types. However, there was one which we spotted fairly early on. Write an operating system.
waccOS % cat /etc/release
waccOS 1.0
Kernel compiled via: WACC-04-HASKELL
AUTHORS: Levente Kurusa
Atanas Gospodinov
Daniel Zvara
To get a feel of the original (I say original, because obviously, we extended it just enough to support an operating system) WACC language, here is a Fibonacci sequence implementation:
begin
int fibonacci(int n) is
if n <= 1 then
return n
else
skip
fi ;
int f1 = call fibonacci(n - 1) ;
int f2 = call fibonacci(n - 2) ;
return f1 + f2
end
println "This calculates the nth fibonacci number recursively." ;
print "Please enter n (should not be too large): " ;
int n = 0;
read n ;
print "The input n is " ;
println n ;
print "The nth fibonacci number is " ;
int result = call fibonacci(n) ;
println result
end
As one can see, the language uses begin and end keywords instead of curly
brackets and also has no notion of void, even requiring a special keyword
for calling functions, call. All function return values have to be assigned
to a local variable and the language has no notion of global variables. WACC
uses an implicit main function, sort of like what Python can do. It also uses
built-in functions like print, read to be able to address the outside
world. The language has been exclusively designed to be fairly easy to write a
compiler for. But not for low-level systems-level programming.
So, what did my team do? We built a fairly simple operating system for the
(in)famous Raspberry Pi ARM board. Given the freedom of writing our own
compiler and implementing any extensions for it, we decided we will implement
extensions that are low-level enough to support an operating system kernel. The
result? A C-like WACC with all the famous features you can guess, like
pointers, structures, and even inline assembly. This how some our code looks
like now:
int test_frame(uint32 a) is
int f = a / 0x1000;
int i = INDEX_BIT(f);
int o = OFFSET_BIT(f);
return (*(frames+i) & (1 << o));
end
bool check_n_frames_free(int start, int n) is
for (uint32 j = 0; j < n; j++) do
if (test_frame(start + 0x1000 * j) != 0) then
return false;
end
end
return true;
end
Before diving into the operating system we wrote, let’s talk about how we built the compiler. We decided that the best language we can choose for writing our compiler is Haskell, because of its excellent support for parsing and a plethora of wonderful tools (that is, mostly type classes) to help us create the compiler. Originally, people were supposed to be using the stack for every local variable, however, we implemented a register allocator based on the Linear Scan Register Allocation algorithm devised by MIT and IBM computer scientists back in the 1990s. This allowed us to avoid overusing the stack and made our resulting assembly code just a bit more deterministic.
One of the first things we implemented in waccOS is a method to communicate via the serial port so that we could save the time that we would otherwise need to implement a full-blown terminal emulator with font rendering and all the escape codes. Instead, we opted for implementing a driver for the UART that exists as GPIO #14 and #15 on the board. However, this was not as easy as it sounds. We’ve hit two major obstacles, including a quite severe one. We followed the specification of the UART closely and even tried copy/pasting tutorial code, but for some reason, the UART console on my Linux box was not displaying anything. Maybe it’s the FTDI chip we use? Maybe the cable is damaged? Maybe the Raspberry PI is faulty? After countless days of debugging without success, it struck me. Maybe, we should try reverting the boot firmware to an older version! We reverted to a May 2016 version and surprise, it worked! I’ll eventually write a separate blog post on this issue because the way we debugged this issue and all those contradicting results that came in were really amusing in retrospect.
Second issue also constitutes a blog post. This time we spent a fair amount of
time figuring out that we needed to have our strings aligned to a 16-byte
boundary for our UART code to work. This taught us the lesson that ARM
unaligned/aligned access is a wonderful piece and is definitely worth a blog
post. For example, while on recent ARM processors most instructions support
unaligned access, STM and LDM (Store Multiple and Load Multiple,
respectively) do not, in fact, they result in undefined behavior! (Which
sometimes confused us, because it seemed to work every once in a while)
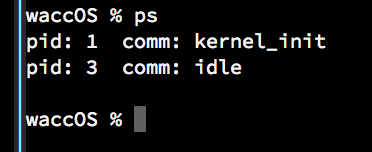
Anyway, after we got the UART working, we decided that we should write a very simple, but interactive shell. This shell later formed a critical part as we could both test our compiler’s new features and waccOS’s new features as well with ease. For example, here is us testing the ps functionality which basically tests the scheduler:
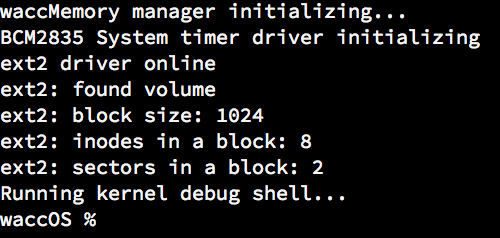
Or here is us debugging the ext2 driver:
Overall, this project has been massive fun. I plan to go over each important feature of our operating system kernel and write a blog post on how they’ve been built and the challenges we’ve faced. In the next part of this series I will talk a little about ARM’s way of dealing with unaligned access since this has proved to be a really important knowledge that anyone planning to do bare-metal programming for ARM has to know.
*PS: The source code for the compiler is sadly not publicly available due to academic integrity, however if you send me a message, I’ll send you a zip. Meanwhile, the OS is available here